Road Following
In this example we'll collect an image regression dataset that will enable JetBot to follow a road! We'll teach JetBot to detect a target x, y image coordinate that the JetBot will chase. As JetBot gets closer to the point, it moves further along the track.
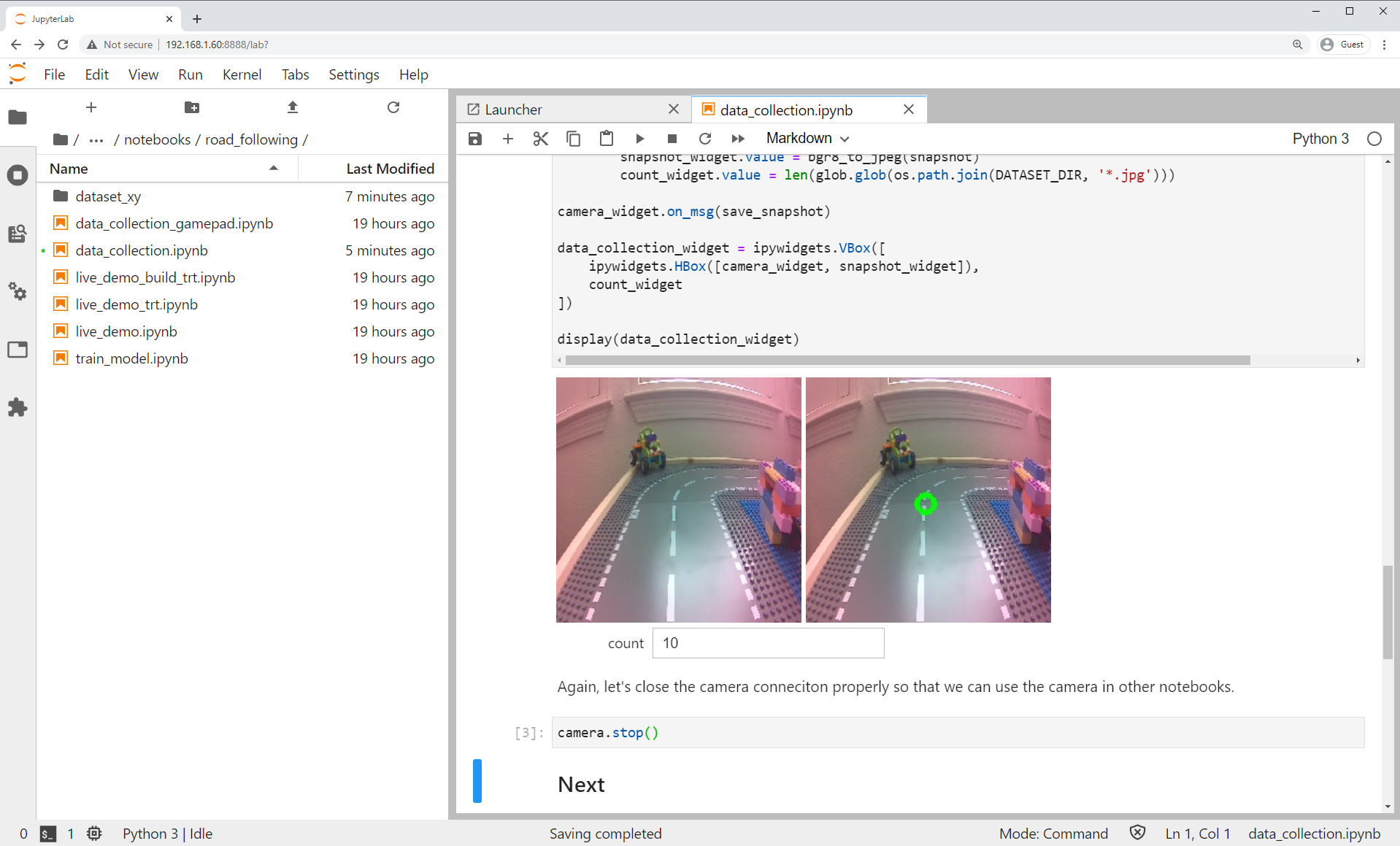
Step 1 - Collect data on JetBot
- Connect to your robot by navigating to
http://<jetbot_ip_address>:8888 - Sign in with the default password
jetbot - Shutdown all other running notebooks by selecting
Kernel->Shutdown All Kernels... - Navigate to
~/Notebooks/road_following/ - Open and follow the
data_collection.ipynbnotebook
Step 2 - Train neural network
Option 1 - Train on Jetson Nano
- Connect to your robot by navigating to
http://<jetbot_ip_address>:8888 - Sign in with the default password
jetbot - In the Jupyter Lab tab, navigate to
~/Notebooks/road_following - Open and follow the
train_model.ipynbnotebook
Option 2 - Train on other GPU machine
-
Connect to a GPU machine with PyTorch installed and a Jupyter Lab server running
-
Upload the road following avoidance training notebook to this machine
- Open and follow the
train_model.ipynbnotebook
Step 3 - Optimize the model on Jetson Nano
- Connect to your robot by navigating to
https://<jetbot_ip_address>:8888 - Sign in with the default password
jetbot - Shutdown all other running notebooks by selecting
Kernel->Shutdown All Kernels... - Navigate to
~/Notebooks/road_following - Open and follow the
live_demo_build_trt.ipynbnotebook to optimize the model with TensorRT
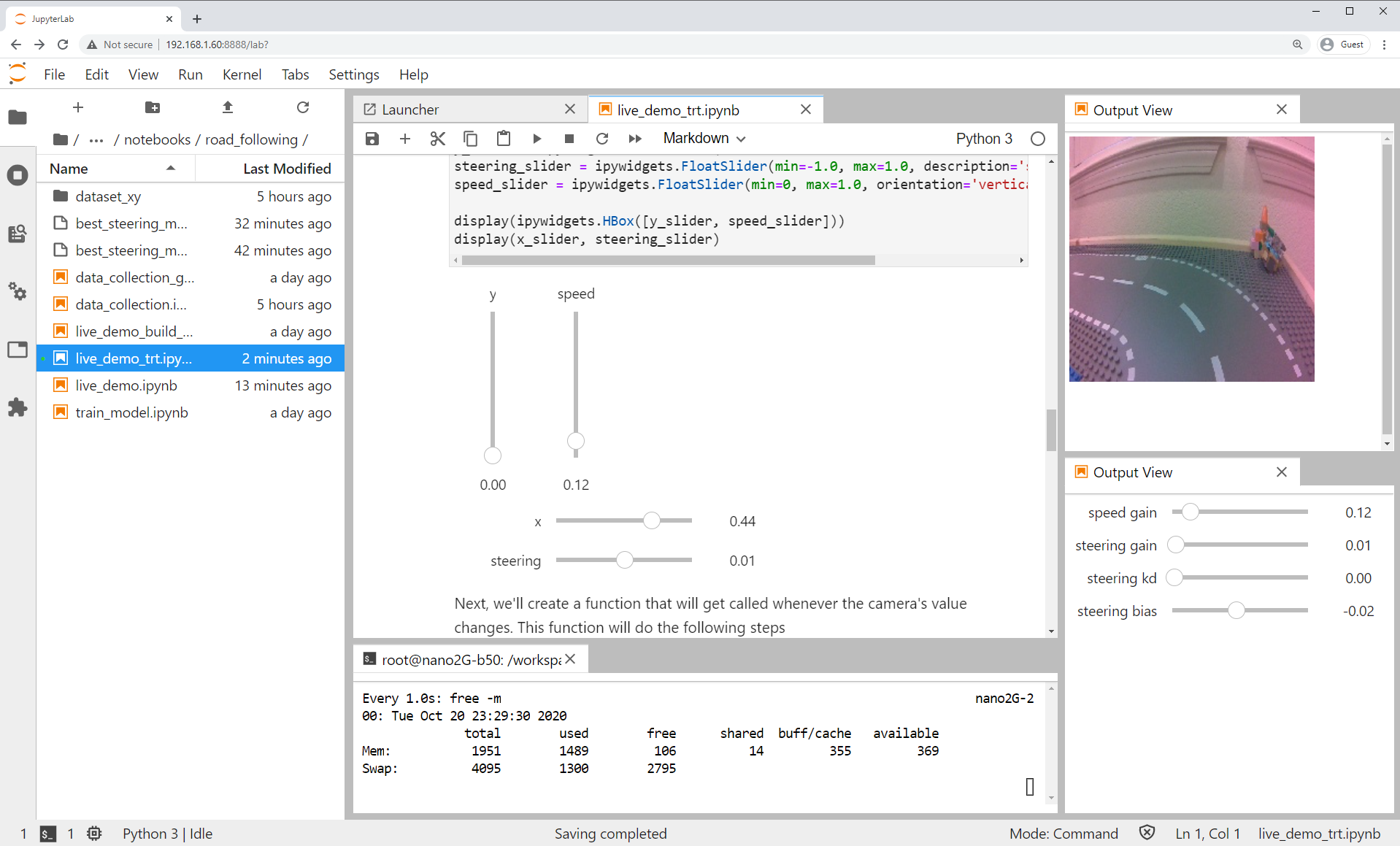
Step 4 - Run live demo on JetBot
- Connect to your robot by navigating to
http://<jetbot_ip_address>:8888 - Sign in with the default password
jetbot - Shutdown all other running notebooks by selecting
Kernel->Shutdown All Kernels... - Navigate to
~/Notebooks/road_following - Open and follow the
live_demo_trt.ipynbnotebook to run the optimized model
Warning
Start cautious and give JetBot enough space to move around.